Control de drones mediante Reinforcement Learning


Los invitamos al webinar organizado por el grupo de Mecánica Computacional en el 4to Ciclo de Conferencias IMEC:
Control de drones mediante Reinforcement Learning
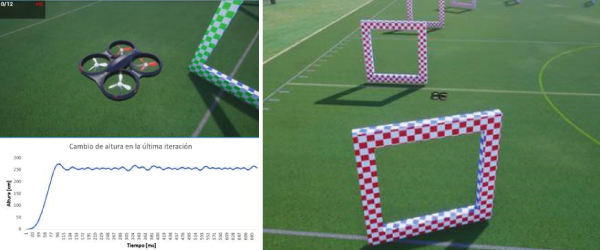
En esta charla se introducirá al funcionamiento de técnicas de aprendizaje por refuerzo y cómo estas nos pueden ayudar a resolver problemas complejos como el seguimiento de trayectoria en drones de carrera. También se podrá observar cómo las simulaciones dinámicas avanzadas pueden ser una solución para la implementación inicial de algoritmos que en sus primeras iteraciones pueden ser destructivos para este tipo de vehículos.
Conferencista: Juan Felipe Garzón Albarracín
Juan Felipe es Ingeniero mecánico y electrónico de la Universidad de los Andes, actualmente esta en su último semestre de Maestría en Ingeniería Mecanica. Su interés por los vehículos aéreos y por las nuevas tecnologías creció en el últimos años, tanto así, que inicio una Startup llamada SPYBEE dedicada a la implementación de este tipo de vehículos en la gerencia de proyectos.
Si desea asistir a este webinar debe inscribirse previamente y hacer clic en el siguiente enlace en el horario indicado.